Int-Ball2 Digital Twin
A digital twin of the JEM Internal Ball 2 in Isaac Sim.
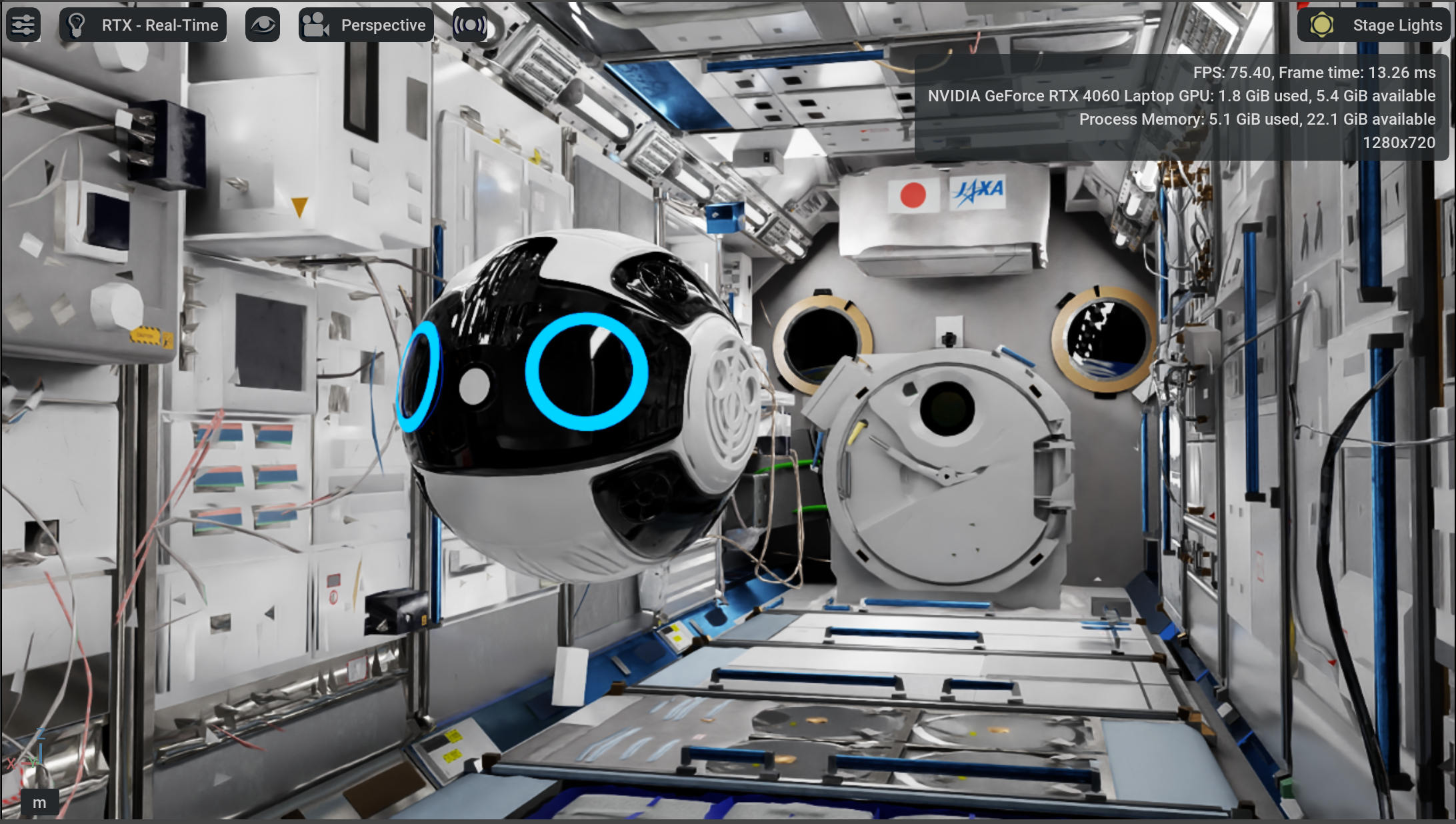
As I had a chance to join the Innovation team of Spacedata Inc.. I was responsible for space robotics simulation development. So this project involved the creation of a photorealistics simulation environment for the JEM Internal Ball Camera 2 (Int-Ball2), a free-flying camera robot used inside the Japanese Experiment Module “Kibo” on the International Space Station (ISS). The goal was to develop a digital twin of the robot using NVIDIA Isaac Sim.

Int-Ball2 Isaac sim simulation.
Key responsibilities included:
- Simulation Environment: Architecting and implementing the core simulation environment in Isaac Sim, which represents the physical dynamics of the Int-Ball2 operating within the ISS-Kibo module.
- ROSbag Replay Functionality: Another key feature that I implemented is developing a ROS2 package to process and republish rosbag files recorded from the actual Int-Ball2 on the ISS to feed real-world sensor data and commands into the simulation and analyze the differences between the simulated and physical robot’s behavior, which is a core concept of a digital twin.
The github of the project is available here (Inc., 2025)
References
2025
- GitHub